المحركات الخطوية

فهم المحركات الخطوية: كيف تعمل وأين يمكن استخدامها
تُعد المحركات الخطوية نوعًا فريدًا من المحركات الكهربائية المصممة للتحكم الدقيق في الموضع والحركة المتكررة. بخلاف محركات التيار المستمر العادية التي تدور بحرية عند توصيل الطاقة، تدور المحركات الخطوية على شكل خطوات متقطعة، مما يجعلها مثالية للتطبيقات التي تتطلب الدقة والتكرار.
1. ما هو المحرك الخطوي؟
المحرك الخطوي هو محرك متزامن عديم الفرش يعمل على تقسيم الدورة الكاملة إلى عدد محدد من الخطوات المتساوية. كل نبضة كهربائية تُرسل إلى المحرك تحركه خطوة واحدة للأمام أو للخلف، مما يسمح بالتحكم الدقيق في الزاوية دون الحاجة إلى حساس موضع خارجي.

2. كيف يعمل؟
يتكوّن المحرك الخطوي من ملفات كهرومغناطيسية تحيط بروتور (عضو دوار) مركزي. عند تنشيط الملفات بتسلسل معين، يتشكل مجال مغناطيسي يجبر الروتور على محاذاة نفسه والانتقال خطوة بخطوة.
أنواع المحركات الخطوية
- محركات خطوية أحادية القطب (Unipolar)
تحتوي على نقطة وسطية في كل ملف، مما يسهل التحكم بها على حساب عزم الدوران. - محركات خطوية ثنائية القطب (Bipolar)
تستخدم الملف بالكامل بدون نقطة وسطية، وتتطلب دائرة تحكم على شكل H-Bridge لكنها تقدم عزم دوران أعلى.

3. زاوية الخطوة، الدقة، ونسبة التخفيض
تعتمد الحركة الزاوية للمحرك الخطوي على زاوية الخطوة الداخلية، وإذا كان يحتوي على علبة تروس تقلل من السرعة.
تحليل محرك 28BYJ-48
محرك 28BYJ-48 هو محرك خطوي مزود بعلبة تروس، ويعتمد عدد خطوات الدوران الكامل على كل من المحرك الداخلي ونسبة التخفيض:
- زاوية الخطوة الداخلية: 11.25 درجة لكل خطوة
- عدد الخطوات لدورة كاملة داخلية: 360° / 11.25° = 32 خطوة
- نسبة التخفيض: حوالي 63.68395:1 (غالبًا ما تُقرب إلى 64:1)
عدد الخطوات لدورة كاملة للخارج:
- نمط الخطوة الكاملة: 32 × 63.68395 ≈ 2038 خطوة
(عادة ما تُقرب إلى 2048 لسهولة البرمجة) - نمط نصف الخطوة: 64 × 63.68395 ≈ 4076 خطوة
(وغالبًا تُقرب إلى 4096)
ملاحظة: نظرًا لوجود تباين بسيط في التصنيع ووجود ارتخاء (Backlash) في التروس، من الأفضل معايرة عدد الخطوات الفعلية للدوران الكامل لتطبيقات الدقة العالية.

4. مقارنة بين المحرك الخطوي ومحرك التيار المستمر
- سلوك الدوران:
المحرك الخطوي يتحرك بخطوات محددة، بينما محرك التيار المستمر يدور بحرية عند توصيل الطاقة. - التحكم في الموضع:
المحرك الخطوي يوفّر دقة مدمجة، بينما يحتاج محرك التيار المستمر إلى مستشعر ومغلق الحلقة لتحقيق الدقة. - عزم الدوران عند السرعات المنخفضة:
ممتاز في المحرك الخطوي، بينما يحتاج محرك التيار المستمر إلى تروس لتحقيقه. - سهولة التحكم:
المحرك الخطوي يحتاج إلى مشغل وإشارات نبض، بينما يمكن تشغيل محرك التيار المستمر بسهولة باستخدام الجهد أو PWM. - استهلاك الطاقة في وضع التوقف:
المحركات الخطوية تستمر في سحب التيار للحفاظ على الموضع، بينما لا يستهلك محرك التيار المستمر طاقة عند التوقف.

5. مقارنة بين المحرك الخطوي والسيرفو
- وجود تغذية راجعة:
المحرك الخطوي يعمل في نظام مفتوح، بينما يستخدم السيرفو تغذية راجعة داخلية. - العزم عند السرعة:
المحرك الخطوي يفقد العزم عند السرعات العالية، بينما يحتفظ السيرفو بالعزم. - الدقة في الموضع:
المحرك الخطوي قد يفقد خطوات تحت الحمل، بينما يصحح السيرفو الموضع تلقائيًا. - استهلاك الطاقة أثناء التوقف:
المحرك الخطوي يستهلك تيارًا ثابتًا، بينما السيرفو لا يسحب طاقة إلا عند الحاجة. - حدود الدوران:
المحرك الخطوي يمكن أن يدور باستمرار، بينما السيرفو عادة يدور بين 0° و 180°، أو حتى 270° في بعض الأنواع. - التكلفة والتعقيد:
المحرك الخطوي أرخص وأسهل في الاستخدام، بينما السيرفو أكثر تطورًا وأعلى تكلفة.

6. أوضاع التحكم
يمكن تشغيل المحرك الخطوي بعدة أوضاع:
- نمط الخطوة الكاملة: كل نبضة تحرك خطوة كاملة
- نمط نصف الخطوة: يضاعف الدقة عن طريق تشغيل ملف واحد أو اثنين بالتناوب
- التقسيم الدقيق (Microstepping): يستخدم PWM للتحكم الجزئي في التيار لتحقيق حركة ناعمة ودقيقة
7. تشغيل المحرك الخطوي
لا يمكن توصيل المحرك الخطوي مباشرة بأردوينو، بل يحتاج إلى مشغل (Driver) يتحمل التيار ويتحكم في تسلسل التشغيل.
مشغلات شائعة:
- A4988
- DRV8825
- TMC2209
- ULN2003 (يُستخدم مع محركات Unipolar مثل 28BYJ-48)

8. تطبيقات المحركات الخطوية
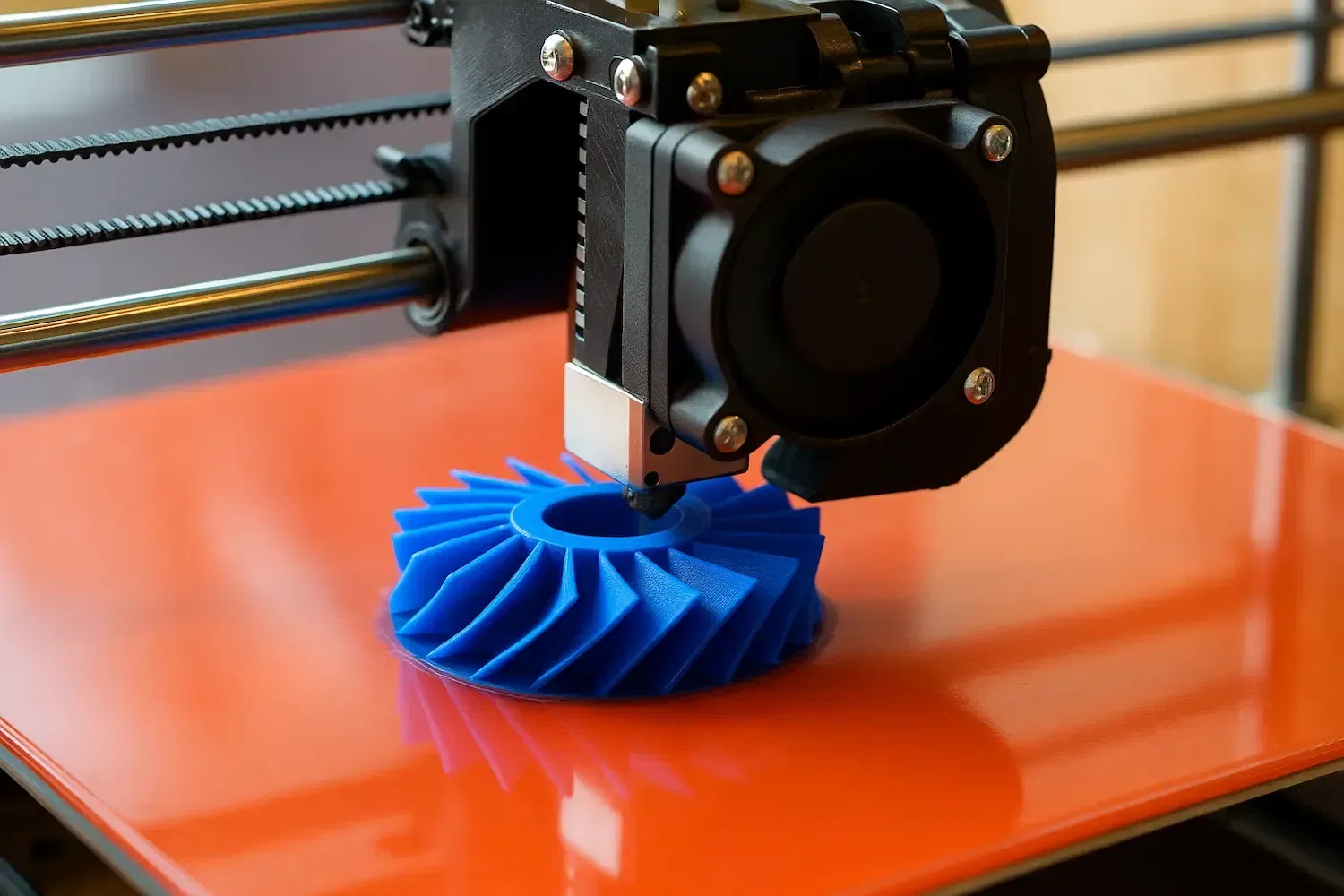
- الطابعات ثلاثية الأبعاد
- ماكينات CNC
- قواطع الليزر
- متحكمات الكاميرا
- الأذرع الروبوتية
- الراسمة (Plotter)
- أنظمة التغذية التلقائية


9. استهلاك الطاقة في وضع التوقف
المحركات الخطوية تستمر في سحب التيار حتى عندما تكون متوقفة لتوفير عزم التثبيت (Holding Torque).
الأسباب:
- ملفات المحرك تبقى نشطة
- أغلب المشغلات تنظم التيار بشكل مستمر (Chopper Drivers)
- يتولد بعض الحرارة حتى في حالة السكون
تقليل استهلاك الطاقة في وضع التوقف:
- استخدام خاصية تقليل التيار أثناء التوقف (Idle Current Reduction)
- استخدام دبوس "ENABLE" لفصل الطاقة عند الحاجة
- تقليل الجهد المرجعي (VREF) أو استخدام PWM
- فصل التغذية نهائيًا إذا لم يكن مطلوبًا الحفاظ على الوضع

⚠️ تحذيرات التغذية الكهربائية
❌ لا تستخدم منفذ 5V في الأردوينو
لا يُنصح بتغذية المحرك من منفذ 5V الخاص بالأردوينو، حيث أن المحرك يستهلك تيارًا عاليًا يتجاوز قدرة منظم الجهد في الأردوينو، مما قد يؤدي إلى:
- إعادة تشغيل الأردوينو تلقائيًا
- ارتفاع حرارة المنظم
- تلف دائم في لوحة الأردوينو
استخدم مصدر تغذية خارجي منظم بجهد 5 فولت.
⚠️ لا تفترض أن ULN2003 ينظم الجهد
صحيح أن ULN2003 يدعم جهدًا من 5 إلى 12 فولت، لكن هو لا ينظم الجهد، بل يُمرر الجهد كما هو إلى المحرك.
لذا، إذا كان المحرك مصممًا للعمل على 5 فولت، لا تستخدم 12 فولت، وإلا قد يتلف المحرك.

التوصيلات
- IN1 → منفذ D8 في الأردوينو
- IN2 → منفذ D9
- IN3 → منفذ D10
- IN4 → منفذ D11
- VCC في ULN2003 → مصدر تغذية خارجي 5V
- GND في ULN2003 → مشترك مع GND الخاص بالأردوينو
- GND في الأردوينو → متصل مع ULN2003
يتم توصيل المحرك مباشرة عبر المقبس الأبيض المكون من 5 أطراف.
كود أردوينو تجريبي
1#include <Stepper.h>23const int stepsPerRevolution = 2048; // القيمة التقريبية لدورة كاملة45Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11);67void setup() {8 myStepper.setSpeed(10); // سرعة الدوران: 10 RPM9}1011void loop() {12 myStepper.step(stepsPerRevolution); // دوران مع عقارب الساعة13 delay(1000);14 myStepper.step(-stepsPerRevolution); // دوران عكس عقارب الساعة15 delay(1000);16}17

ملاحظات ختامية:
- استخدم 2048 خطوة كقيمة تقريبية — القيمة الفعلية تعتمد على نوع المحرك
- تأكد من أن المحرك والمشغل يشتركان في نفس طرف الأرضي (GND) مع الأردوينو
- يُفضل استخدام مكتبة AccelStepper للحصول على تسارع وتحكم أكثر سلاسة
- لا تتجاوز جهد التشغيل المسموح به للمحرك الخطوي
الخلاصة
المحركات الخطوية توفر دقة ممتازة وتحكم سهل نسبيًا، وهي خيار مثالي للهواة والمهندسين على حد سواء. مع فهم جيد لزاوية الخطوة، ونسب التروس، وأنماط التحكم، يمكنك استخدامها في تطبيقات متعددة من الطباعة ثلاثية الأبعاد إلى الروبوتات.
محرك 28BYJ-48 تحديدًا يعتبر خيارًا ممتازًا للبدء، بشرط توصيله وتغذيته بطريقة صحيحة وآمنة.
مواضيع ذات صلة:

تعرّف على كيفية عمل مستشعرات الحمل وأنواعها، وكيفية استخدامها في مشاريع الإلكترونيات والوزن باستخدام الأردوينو
تعرف على كيفية عمل حساس الموجات فوق الصوتية، مدى دقته، وأهم استخداماته في الإلكترونيات والروبوتات. اكتشف التطبيقات العملية والنصائح المهمة لاستخدامه في مشاريعك.

تعرّف على ديودات الرجوع (Flyback Diodes)، وكيفية عملها، ولماذا تُعد ضرورية لحماية الدوائر من ارتفاعات الجهد الناتجة عن الأحمال التحريضية مثل المحركات والريليهات.

اكتشف كيفية عمل شاشات العرض ذات 7 قطاعات، تركيبها الداخلي، أنواعها (الأنود المشترك مقابل الكاثود المشترك)، وكيفية استخدامها في مشاريع أردوينو. دليل مثالي للمبتدئين وهواة الإلكترونيات.

تعرّف على أساسيات محركات السيرفو في هذا الدليل للمبتدئين — بما في ذلك كيفية عملها، وأنواعها الشائعة، وتوصيل الأسلاك، ومتطلبات الجهد، واستخدامها في الطائرات اللاسلكية والروبوتات.

تعرّف على طريقة عمل أزرار الضغط في الدوائر الرقمية، بما في ذلك استخدام مقاومات السحب لأعلى ولأسفل، وكيفية معالجة الارتداد باستخدام تقنيات الهاردوير والبرمجيات. دليل مهم للمبتدئين في الإلكترونيات ومحبّي الأردوينو.
أو بإمكانك إستكشاف تصنيفات أخرى
عالم الإلكترونيات
